|
||||||||||
2022年 車載LiDAR向け SPAD直接ToF方式距離センサーを商品化 (ソニー) ~個別半導体・他~ |
||||||||||
|
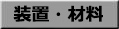
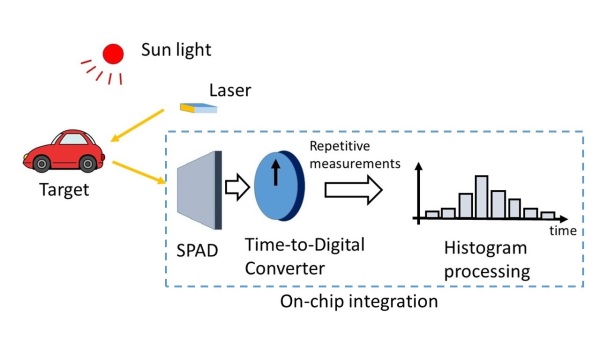
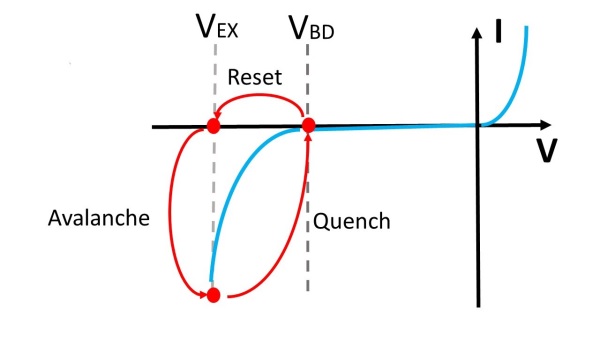
先進運転支援システム(Advanced Driver Assistance System: ADAS)の普及や自動運転(Autonomous Drive: AD)にむけて、200~300mの遠方まで高精度に3次元計測が可能な、SPAD(Single Photon Avalanche Diode)直接ToF(Direct Time of Flight)方式の距離センサーを用いたLiDAR(Light Detection and Ranging)が重要性を増している。 直接TOF方式は、図1に示すようにレーザー光をパルス状に照射して、光が対象物から反射して返ってくるまでの飛行時間(Time of Flight: ToF)を計測することで、対象物までの距離を測定する。SPAD直接ToF方式では、反射光の検出に単一光子を検出する半導体素子SPADを使用する。 図2にSPADのI-V特性とPhoton Counting 動作を、図3にSPAD受光回路と動作波形を示す。SPADは、図2に示すように、PN接合フォトダイオードにブレークダウン電圧(VBD)を超える過剰エクセスバイアス電圧(VEX)を印加する。光子(フォトン)が入射すると、光電変換により発生した電子がアバランシェ増倍によって激増し、大電流が流れる(ガイガーモードと呼ばれる)。クエンチ抵抗による電圧降下で、電極間電圧がブレークダウン電圧まで低くなると、アバランシェ増倍は停止する(クエンチ動作)。発生した電子を放電し、電極間電圧を過剰エクセスバイアス電圧に設定すると、フォトンを検出できる状態に戻る。(リチャージ動作)。 アノード電圧の変化を検出することで、1フォトンで1電圧パルスを発生でき、高感度なフォトン検出ができる。パルス発生までの時間を時間‐デジタル変換器(Time-to-Digital Converter:TDC)で計測し、光の往復時間から距離を算出する。SPADが1フォトンに反応している間は、次のフォトンが入射しても反応できないDead-Timeと呼ばれる期間が発生する。Dead-Timeを短縮するために、クエンチ抵抗を含めてデバイス構造の工夫と、高速TDC回路が要求される。 SPADでは、Dead-Time 中に入射したフォトンは検出できないことにくわえて、対象物から反射して戻ってきた信号光パルスフォトンと、太陽光などの背景光の影響などによる背景雑音の区別が出来ない。この課題を克服するために、複数のSPAD(3x3,6x6)で構成するマクロピクセルで、入射フォトンの空間的・時間的相関を探査するマクロピクセルアーキテクチャ1)、測定を繰り返して到達時間のヒストグラムを構築し、ヒストグラムのピーク位置から距離情報を得るTCSPC(Time-Correlated Single Photon Counting)技術2)などの信号処理回路が必要になる。 ソニーは、1/2.9型(対角。6.25mm)有効約10万画素の車載LiDAR向けSPAD 直接ToF方式距離センサー『IMX459』を2022年3月に商品化した3)~5)(図4)。センサーは、SPADアレーを集積した裏面照射型の画素チップとクエンチ回路、信号処理回路を搭載したロジックチップを、Cu-Cu接続で積層している。 画素チップは裏面照射型で、オンチップマイクロレンズを装着したSPADが189(H)×600(V))個、10μmピッチで集積されている。近赤外線(Near Infrared: NIR)光の吸収を高めるため、7μm厚のシリコン層がSPADの光電変換層に採用され、下部に金属反射板が挿入されている。アバランシェ領域の高電界と光電変換領域のドリフト電界の最適設計により、波長905nmの光で24%を超える光電子検出効率を実現している。上部から下部まで貫通した金属を重鎮したフルトレンチアイソレーション(Full Trench Isolation: FTI)により、クロストーク抑制が図られている。画素チップは裏面照射のための工程を追加した90nmCMOSプロセスで製造される。(図5) 一方、ロジックチップ には、クエンチとリチャージ動作を行う読み出し回路、TCSPC-based DSPなどの信号処理回路が搭載され、1Al 10Cu配線の40nmCMOSプロセスで製造される。Cu-Cu接続による積層で、高開口率(Fill Factor: FF)を実現している。 微小電子機械システム(Micro Electro Mechanical System: MEMS)方式SPAD LiDARシステムによる実証実験で、最大300mの距離を測距可能なことが示されている。117klux(直射日光相当)の背景光下で、反射率10%の対象物の場合150mまで、反射率が95%の対象物の場合は200mまで、測定が可能なことが実証された。 |
||||||||||
|
||||||||||
|
||||||||||
|
||||||||||
|
||||||||||
|
||||||||||
|
【参考文献】
【移動ページ】 個別半導体他/該当年代へ 【最終変更バージョン】 rev.001 2023/9/14 |